Who Invented (Electroactive Polymer) Artificial Muscle?
Artificial muscles can be divided into three major groups based on their actuation mechanism.
- Electroactive polymers
- Ion-based actuation
- Pneumatic actuation
The human body is an extremely complex machine. Just like a car, it has parts that function as cables, pipes and engines, and after grinding this fuel as much as it needs fuel to run, it produces waste. Today, the similarities between a human and a car end at this point, but it is believed that in the near future machines will become much more human-like after the widespread use of artificial muscle (electroactive polymer) technology.
Standard electric motors have their own limitations. They are noisy, expensive, not easy to reduce in size, heavy and prone to breakage. Now consider a human muscle instead of an electric motor. It works relatively quietly, is efficient, can be shrunk down to the cell level and can run millions of times without breaking down (the human heart is the best example).
The United States government contacted SRI International in 1992 and asked them to develop an artificial biological muscle. The company then started working on electroactive polymers.
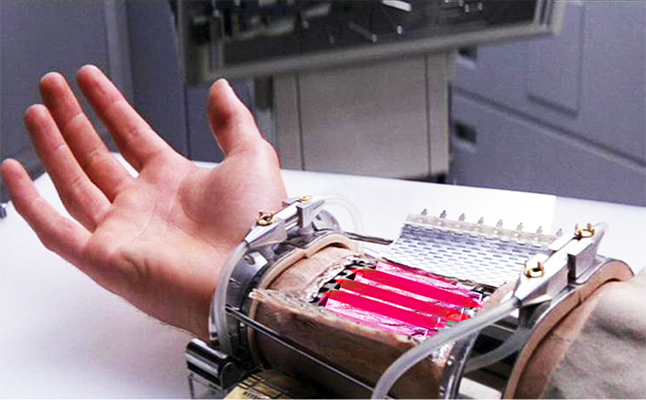
To summarize briefly, electroactive polymers are materials that can contract and relax just like a muscle when an electric current is applied to them. Moreover, they quickly recover when the opposite polarity charge is applied. Electroactive polymers were previously used to increase the efficiency of robotic movements. (Yes, SRI was also working on a range of plastic and polymer wings.) But the possible uses for electroactive polymers are endless. Since its invention, artificial muscle has been used in many areas, from prosthetic legs to an airplane's valve or control controller.
Since 2007, scientists in the United States have been working on an artificial muscle that can heal itself and generate electricity while working. The same scientists are also working on "micromuscles" developed using the heart cells of mice. These muscles are capable of holding, walking, and swimming. Developments in this field will pave the way for the development of robots that can walk and move just like humans in the future.