Who developed the first biped robot and when?
Before the Waseda-Hitachi Leg II (WHL-11) bipedal robot was announced at the 1985 Tsukaba Fair in Japan, robots could navigate by crawling or moving on wheels.
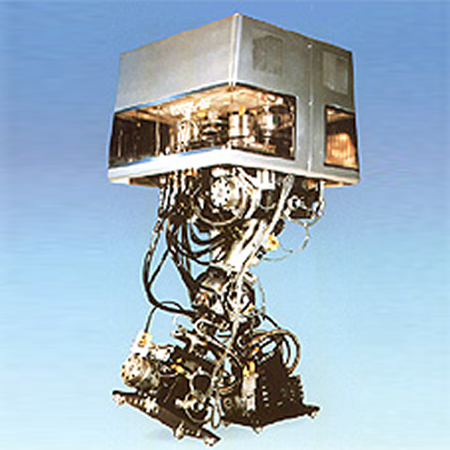
This bipedal robot produced by Hitachi was different from the others. This robot could walk.
Developed jointly by Hitachi and Waseda University in Japan, there was a computer and a hydraulic piston on this robot. The WHD-11 was capable of walking on a flat surface, and it took the robot exactly thirteen seconds to take each step. The robot could also turn.
Before the Waseda-Hitachi Leg II (WHL-11) biped robot was unveiled at the 1985 Tsukuba Expo in Japan, robots could roll, drag, or crawl their way around.
If a robot can walk like a human, then what this robot can do is limitless. A robot that can go up and down stairs and rotate around objects can perform many actions. However, in order for a robot to do this, it needs two legs, just like a human. The bipedal robot can also walk on uneven surfaces.
The walking systems of bipedal robots initially focused on walking on a flat surface by standing in balance. If the center of mass of a robot that can walk with dynamic balance goes beyond the predetermined place of the robot's feet, the robot may fall just like a human. Therefore, the robot's foot should be able to touch the ground at a right angle, just like a human foot, and be able to bend at different levels when necessary. While the variable and flexible structure of the human foot allows people to walk easily even on uneven surfaces, this is not the case for the bipedal robot for now. As a result of the work of scientists on robots every day, it will enable robots in the future to walk on very different surfaces without falling, just like humans.